
NOAA’s Okeanos Explorer ship set sail from Florida on May 14 to embark on a NOAA Ocean Exploration-led demonstration to test technologies that will allow the ocean exploration community to explore deeper, farther and more comprehensively than previously possible.
The two-week expedition includes the technology demonstration of an autonomous underwater vehicle called Orpheus. Orpheus is a new class of submersible robot and will showcase a system that will help it find its way and identify interesting scientific features on the seafloor.
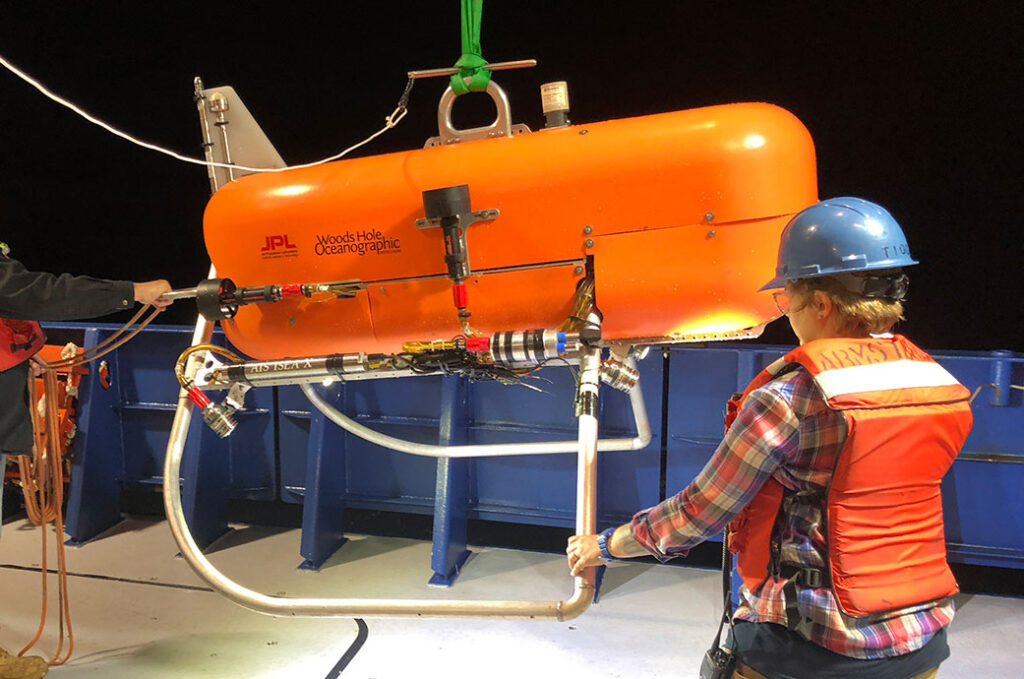
Image: NASA/JPL-Caltech
Designed by the Woods Hole Oceanographic Institution and developed by engineers at NASA’s Jet Propulsion Laboratory (JPL) in Southern California, Orpheus is an evolution of the vision-based navigation that has been used on Mars.
It utilizes a low-power system of cameras and lights, along with advanced software, and can work untethered almost anywhere in the ocean, including the most extreme depths. Smaller than a quad bike and weighing about 550 lb (250kg), Orpheus is designed to be nimble, easy to operate and rugged while exploring depths inaccessible to most vehicles.
Ultimately, the project team hopes to see a swarm of these underwater robots work as a team to build 3D maps of the vast regions of unexplored ocean floor in the hadal zone – regions deeper than 20,000ft (6,000m).
“This tech demo will be used to gather data to demonstrate the viability of terrain-relative navigation in the ocean while showing how multiple robots will operate together in extreme environments,” said Russell Smith, robotics mechanical engineer at JPL. “These tests will put us on track to start future dives into the hadal zone and intelligently seek out exciting regions of high biological activity.”
Orpheus’s version of vision-based navigation is called visual-inertial odometry, or xVIO, and it works by using a system of advanced cameras and pattern-matching software along with instruments that can precisely measure its orientation and motion. As Orpheus travels over the seafloor, xVIO identifies features, such as rocks, shells and coral, below the vehicle. xVIO will construct 3D maps using these features as waypoints to help it navigate.
The high-resolution maps xVIO creates are stored to memory so that when Orpheus returns to the area, it will recognize the unique distribution of the features and use them as a starting point to expand its exploration. And when working with robot buddies, maps can be shared, cross-referenced and developed to quickly identify areas of scientific interest.